EN


如今無人機因其身形小巧、操作便捷的優勢,在許多行業應用中已經發揮了自己的作用。但是隨著應用的深入,無人機需要人工充電、需要人工操控等缺乏獨立性的問題也顯現出來。因此,無人機自動機場應運而生,通過自動化的作業方式,降低無人機對人工的依賴,提高無人機的作業能力。那么,無人機自動機場由哪幾部分組成呢?下面我們就來介紹。

蜂巢航宇SU-30多旋翼智能無人機場可在野外自然環境中為無人機提供存儲充電場所,具備一鍵操控、高精度起降、遠程控制、自主充電、自主斷電、遠程指揮、警示及多重安全策略等功能。
1、智能停機艙
智能停機艙采用上下艙分離設計,方便運輸且減少重量;具備高精度復位模塊,能夠將無人機復位至指定位置;具備一體化環境傳感器能實時感知停機艙周圍氣象環境;能與無人機協同控制,實現自動打開關閉及充電;采用市電供電,為無人機提供了存儲起降場所,保證無人機全天候作業能力。
2、智能無人機巡檢系統
智能無人機巡檢系統具有高度智能化和自主化。基于無人機軌跡記錄自主學習功能實現巡檢線路智能規劃;基于北斗高精度差分技術實現無人機精準降落;標準化飛巡和拍照,保障巡檢照片同規格、同角度,提高了巡檢效率。
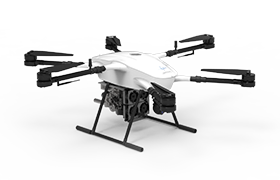
3、載荷
無人機可掛載單可見光載荷、可見光+熱像儀雙光載荷、4G遠程喊話器等。載荷均采用小型輕量化技術方案,結合高精度陀螺穩定控制技術、多閉環復合控制技術、陀螺空間解算算法和陀螺漂移抑制算法,實現巡檢作業過程中光學傳感器視軸的高穩定性,保證拍攝到高清晰度圖像。
4、指揮中心軟件
指揮中心軟件均采用指令按鍵式設計,操作方便簡單。可以規劃無人機航跡,控制無人機飛行,實時察看無人機及停機艙狀態。
5、數據鏈路
指揮中心與停機艙通過4G模塊,經過公網傳輸圖像與數據,無人機與停機艙之間通過4G模塊/微波數據鏈傳輸圖像與數據。